Risk Assessment
A Risk Assessment considers equipment, materials, tools, and work practices associated with a task. The Robot Safety Risk Assessment breaks down work into discrete tasks and identifies associated hazards. Identification of hazards is the most important element of the risk assessment process. If hazards are not identified, the risks associated with those hazards cannot be reduced.
Risk Assessment Process
To properly use the Risk Assessment tools in this section, the person completing the Risk Assessment must do the following:
Step 1: Identify the steps and full scope of the task to be completed.
Step 2: Use the Hazard Identification Checklist to determine the applicable hazards for each step within the task and record this information on the Risk Assessment Form. Use multiple forms to cover all identified hazards, if needed.
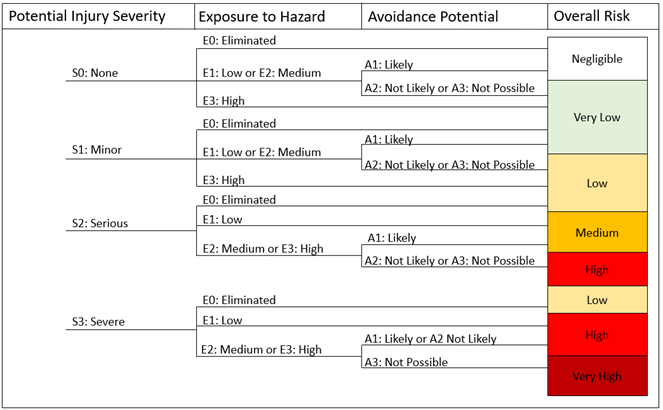
Step 3: Use the definitions in the Risk Categorization Charts to determine the Severity, Exposure, and Avoidance Potential levels for each identified hazard applicable to your task and record the information on your Risk Assessment Form.
Step 4: Use the Risk Level Decision Matrix to determine the overall level of risk associated with your task and record it on the Risk Assessment Form. Tasks with an overall level of risk at Very Low or Negligible don’t require Manager or OHS Team approval to begin work. Tasks with an overall risk level of Low require a responsible Manager to review and approve the Risk Assessment form prior to beginning work. Tasks which have an overall risk level of Medium or higher require OHS approval prior to beginning work.
Step 5: Send a copy of completed Risk Assessment form to OHS for recordkeeping purposes regardless of the overall risk level of the task.
Step 6: Whenever the scope of a task changes, the Risk Assessment must be revised, updated, and resubmitted to OHS.
Risk Evaluation and Categorization
The risk associated with each hazard will be ranked using the criteria in the tables in the sections below.
The ranking of the hazard will be the defining factor for the selection of the appropriate hazard controls and safeguards. Work ranked as High Risk cannot be performed until control strategies are implemented that reduce the Risk to Medium or lower.
In some cases, the Risk Assessment will consider existing, rather than initial, tasks and processes. For those situations, the Risk Assessment will be done pertaining to the work or task as it is currently performed within the existing controls set. If the Risk Assessment finds that risks can be reduced by the application of new or additional controls, those controls will be recommended and documented on the Risk Assessment Form.
Note: It is the responsibility of Microsoft owner of the work to ensure that appropriate hazard controls defined in the risk assessment are fully implemented and maintained.
Risk Level
The table below defines the overall risk level of a task once all factors and safeguards are considered.
Risk level
| Description
|
Very Low
| Follow established procedures and precautions; no additional hazard controls required.
|
Low
| Follow established procedures and precautions with minimal hazard controls required.
|
Medium
| Implement identified hazard controls to reduce risk as much as practicable; proceed only when defined hazard controls are in place.
|
High
| Unacceptable risk: implement additional hazard controls to reduce risk. Re-evaluate before starting work.
|
Severity Level
The table below defines the category of severity for potential injuries.
Severity
| Description
|
S0: None
| No treatment required, no discomfort or slight discomfort likely to resolve itself within less than a day. Would likely be classified as a Near Miss. No lost time or duty modification needed. This includes:
|
S1: Minor
| No treatment beyond first aid required before returning to job, no treatment by a doctor, and no lost time. This includes minor injuries such as:
Bruises
Minor cuts and scrapes
|
S2: Severe
| Normally reversible, will likely return to doing the same job after recovery from the incident. This category is for incidents which require treatment by a doctor and involve lost time. This includes injuries such as:
Broken bones
Severe Lacerations
|
S3: Major
| Non-reversible injuries which may cause long-term hospitalization or result in permanent injury, chronic illness, or disability. This includes:
|
Exposure Level
The table below defines the category of exposure to a hazard while performing a task.
Exposure
| Description
|
E0: Eliminated
|
|
E1: Low
| Risk is greatly reduced by drastically minimizing exposure to the hazard, changing, or substituting materials or equipment, or installing safeguards. Exposure is less than once per shift.
|
E2: Medium
|
|
E3: High
|
|
Avoidance Potential
The table below defines the category of ability to avoid a hazard while performing a task.
Avoidance
| Description
|
A1: Likely
| Sufficient clearance to move out of the way
Hazard is incapable of moving faster than 250mm/sec, safety-rated speed is used
Adequate warning/reaction time
Robot user is positioned in a safe location away from the hazard
|
A2: Not Likely
| Insufficient clearance to move out of the way even when safety-rated speed is used
Path to safe area is obstructed
Hazard is moving faster than 250mm/sec
Inadequate warning/reaction time
Robot user may not be able to see the hazard/obstructed view
|
A3: Not Possible
| Robot system layout causes robot user to be trapped or backed into a corner with the escape route in direction of the hazard
Safety-rated speed not used and insufficient clearance to move out of the way
Safeguarding is not expected to offer protection from the hazard
|
Risk Determination
The Risk Level Decision Matrix below uses the above charts to determine the overall risk of the task.
Hazard Identification Checklist
The checklist below lists some of the hazards associated with robot-related tasks, their origins, and their potential consequences. Reference this list when completing your risk assessment to help identify potential hazards.
Type of Hazard
| Origin
| Potential Consequences
|
Mechanical Hazards
| movements (normal or unexpected) of the robot,
movements (normal or unexpected) of end-effector or any mobile part of robot cell
movements (normal or unexpected) of external axis
end-effector failure (separation)
movement of end-effector tool at servicing position
unintended movement of machines or robot cell parts during handling operations
Materials, equipment, or products falling or ejected from robot or robot support structures
unintended movement of jigs or gripper
unintended release of tool
unintended movement of associated machine(s)
manipulation of products and materials, including ejection during operation
movement or rotation of sharp or pointed tool on end-effector
motion of part with sharp or pointed edge attached to or held by robot
rotation of tool of the end-effector
rotation or movement of associated machine or machine tool in the robot cell
rotational motion of any other robot axes
operator or personnel with loose clothing or long hair in robot cell
getting caught between robot and any fixed object
impossibility to get out of robot cell (via cell door) for a trapped operator in automatic mode
unintended motion of a process-specific end-effector (such as grinding wheels, polishing wheel, wire brush, etc.)
unintended activation of an end-effector or associated equipment (including external axes controlled by the robot)
unexpected release of potential energy from stored sources
|
|
Electrical Hazards
| contact with live parts or connections
confusion of various voltages within a system
contact with discrete components in the electrical (electronic) circuitry, i.e. capacitors
exposure to arc flash
process using high voltage or high frequency, i.e. electrostatic painting, inductive heating
welding applications using high voltage
|
|
Thermal
Hazards
| hot surfaces associated with the end-effector or associated equipment or workpiece
cold surfaces or objects
explosive atmosphere caused by the process, i.e. paint (atomized particles, powder painting), flammable solvents, grinding and milling dust
exposure to temperature extremes required to support the process
|
|
Noise Hazards
| loss of balance, disorientation in working area of robot cell due to unexpected loud noise
inability of two persons assigned to a task to coordinate their actions through normal conversation
ambient noise level so high or distracting as to prevent hearing or understanding audible danger warning signals
long-term exposure to elevated noise levels
| effect on the hearing and balance, awareness
effect on speech communication, perception of acoustic signals
loss of hearing
|
Vibration Hazards
|
|
|
Radiation Hazards
| EMF interference with proper operation of the robot system
exposed to process-related radiation, i.e. arc welding, laser
|
|
Material / Substance Hazards
| servicing, cleaning, lubrication, and changing components that are covered in fluids, cooling and process fluids
unexpected failures to the mechanical and electrical components of the robot system and the protection systems
exposure potential to welding fumes, other thermal decomposition products, or other process hazards
|
|
Ergonomic Hazards
| poorly designed teach pendant, human/machine interface (HMI) touch screen or operator panel too far or high
poorly designed loading/unloading post; long distance between components box location and loading/unloading area
poorly designed enabling devices
inappropriate location of controls
inadvertent operation of controls
hard to reach, exposure to additional hazards due to inappropriate location of operating controls
hard to reach, exposure to additional hazards due to inappropriate location of components that require access for anticipated maintenance actions (troubleshooting, repair, adjustment)
recognition of hazards and hazardous situations is obscured because of poor area lighting
components in enclosures that block existing lighting
HMI units placed too high or low for convenient viewing
|
|
Work Environment Hazards
| environment-induced design concerns, i.e. installations in earthquake zones
one action or failure increases severity of harm, i.e. trying to avoid a sharp edge you, make contact with a hot surface instead
poor housekeeping
inadequate workspace
|
|
Combinations of Hazards
| unexpected movements of robot or end-effectors or associated machine
unpredictable behavior of machine controls due to electromagnetic interference or surges in energy source
robot system is directed to start by one person, but this action is not expected by another person
misinterpretation of collaborating robots or simultaneous motion
issued stop command stops the robot in an incomplete cycle
robot system speed can be adjustable resulting in various tasks being done at a variety of speeds
malfunctions of the control with consequent release of holding devices on the load table or at the end-effectors to move under residual forces (inertia, gravity, spring/energy storage means) and become a missile
malfunctions of the control with consequent release of robot arm brake; release of brake causes robot elements to move under residual forces (inertia, gravity, spring/energy storage means) unexpectedly
unexpected movements of robot or associated equipment(s)
failure of a safeguarding device to function as expected
failure of an associated machine to function as expected
loose unsecured hoses and components separate or whip about
components improperly installed creating unexpected motion/hazard
high-speed rotational parts breaking or disengaging from part retention equipment
overload of robot arm or associated equipment resulting in breaking or buckling of mechanical components
|
|
Risk Assessment Form
Complete the Risk Assessment using the form below. Multiple forms may be needed for complex tasks with multiple steps and hazards.
Risk Assessment Form
| |
Task or Description of Step:
| |
Identified Hazard 1:
| |
Severity:
| Exposure:
| Avoidance:
| Overall Risk Rating:
|
| | |
Identified Hazard 2:
| |
Severity:
| Exposure:
| Avoidance:
| Overall Risk Rating:
|
| | |
Identified Hazard 3:
| |
Severity:
| Exposure:
| Avoidance:
| Overall Risk Rating:
|
| | |
Can additional risk reduction methods can be used?
| |
A copy of this form must be provided to OHS upon completion.
|
*For tasks with a risk rating above___, a lab manager must complete and sign off on the Risk Assessment. For tasks with a risk rating above ___, OHS must conduct a Risk Assessment and work with the cognizant team to identify and implement additional risk reduction methods.
|
Role
| Name (print or type)
| Signature
| Datae
|
Job Owner
|
Lab/Team Manager
|
OHS Staff
|
Operating and Safety Procedures
Briefly describe the proper operating procedures and safety/emergency protocols for the equipment in the Risk Assessment.
Emergency and Incident Notification
For fire, medical, or other emergency, employee should call 911 and Global Security (GSOC)
An employee involved in a work-related injury or illness must:
Email GlobalOHS@microsoft.com for general safety concerns or questions.
Procedure Review Signatures